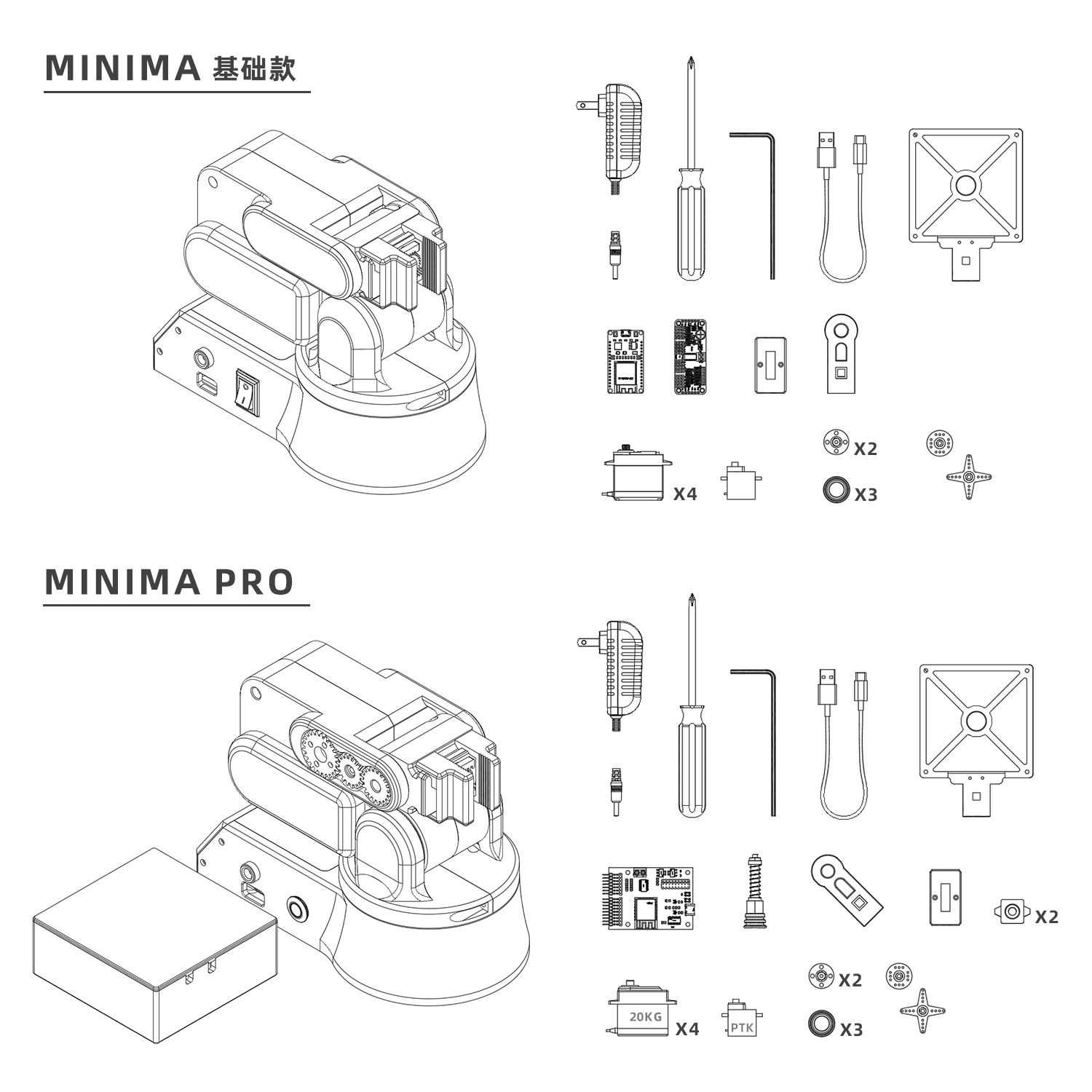
MINIMA 教育机械臂
也许你不需要一个机械臂,而是一个解决方案
专业指令
(常用于工业机械臂)
PTP, JTJ, LIN, HOME, CIRC, TOOL, M280等
多种轨迹优化
(关节空间同步, 笛卡尔空间插值)
线性, 梯形, S曲线, 多项式插值, Cubic B-spline
Text2Gcode
(文字转专业指令)
Bezier曲线插值生成文本轨迹(中文/英文/日文)

生态 好吓人
基础功能
通讯协议,运动速度控制,正逆运动学,模拟器,工作区域分析,固件烧录,TCP偏移等
路径规划与优化
CHOMP/RRT*规划+笛卡尔空间插值,多轨迹优化方法(Linear, Trapezoidal, S-Curve等),物体碰撞检测和自碰撞检测
视觉应用
Eye-to-hand(手在眼外)和Eye-in-Hand(手在眼内)标定。Charuco 标定板生成。相机内参计算。颜色物体ROI检测,模板检测等
专业机械臂语言
类工业机械臂指令(LIN,PTP,JTJ,CIRC,HOME,DELAY,TOOL,M280,SPD等);文本转GCODE指令;预览轨迹;执行,暂停和停止
ROS
一键配置Ubuntu和ROS1/ROS2环境,ROS Serial/ROS2 micro-ROS通讯,RVIZ和MoveIt!配置。
校准/设置
内置接口校准舵机归零和上下限位置,保存至机械臂控制器,无需二次校准。各电机速度单独配置和全局sin2优化。UI设置和规划器设置
拓展功能
GPIO接口,VCC/GND接口,支持拓展外部元件。支持蓝牙和无线开发。
末端工具
支持常见的夹爪,吸盘,和持笔器,并配备对应的URDF。支持工具电路接口快换(仅MINIMA PRO)
LLM管家
大语言模型负责上位机软件Q&A,支持通过语音识别及LLM-Chain生成指令控制机械臂。多种模型支持(OpenAI, Hugging Face, DeepSeek等)
全平台开发(Windows, MacOS, Linux)

技术规格
- 有效负载: 250g
- 工作半径: 150mm
- 重复定位精度: ±0.5mm
- 自由度: 4
- 控制系统: Open loop
- 通信接口: USB, Wi-Fi, Bluetooth
- 编程支持: Python, C++等
- 控制器: Arduino, ESP32
- 软件兼容: ROS, ROS2
¥799 起
购买MINIMA 机械臂